「パラレルロボット」という言葉を耳にしても、実際の仕組みやメリットがピンと来ない方は多いのではないでしょうか。シリアル型やスカラ型と何が違うのか、導入するとどんな効果があるのか──はじめて調べる方にとっては分かりにくいテーマです。
しかし2025年の今、省スペース・高精度・高速動作を実現するパラレルロボットは、製造現場から食品・医療分野まで幅広く普及が進んでいます。 すでに多くの企業が導入を進めており、人手不足や品質向上といった課題解決に役立てています。
本記事では、パラレルロボットの基本構造・直交型やシリアル型との違い・導入メリットや活用事例を、初めての方でも分かりやすく解説します。読んでいただければ、自社に必要かどうかを判断するための基礎知識がしっかり身につき、導入を検討する際の迷いも少なくなるはずです。
まずは「パラレルロボットとは何か?」を正しく理解することから始めましょう。
精密作業に最適なパラレルロボット|構造特徴をわかりやすく解説
パラレルロボットの基本構造と特徴
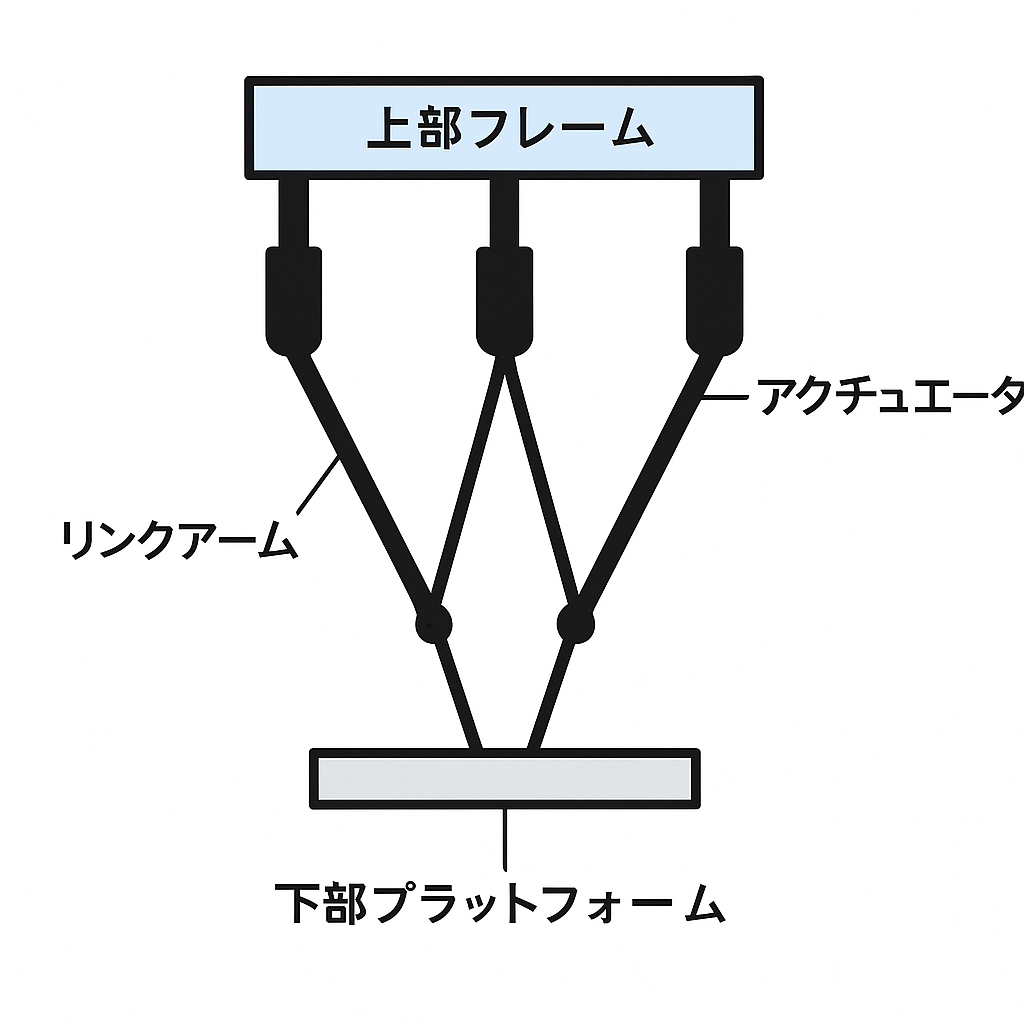
パラレルロボットは、複数のアクチュエータ(駆動装置)を持ち、それらが同時に1つのプラットフォームを制御する構造を持つロボットです。
直列型ロボットとは異なり、各アームが並列に配置されているため、「パラレル(並列)」という名前が付いています。この構造により、高い剛性と精密な動作が可能になります。
特に注目すべきは、パラレルロボットが持つ「高精度」「高速動作」「高剛性」といった特性です。これらの特徴は、製造業や医療分野など、精密さが求められる現場で大きなメリットとなります。
以下に、パラレルロボットの主な特徴をリストでまとめます。
- 高速かつ高精度な動作が可能
- 構造的に剛性が高く、振動に強い
- 可動部が少なく、メンテナンス性が良好
- コンパクトな設計が可能で、省スペース化に貢献
このような特性から、パラレルロボットは従来の直列型ロボットでは対応しきれない領域で活用されています。特に、高速かつ繊細な作業を必要とする工程では、その真価を発揮します。
パラレルロボットの構造や仕組みについてさらに詳しく知りたい方は、こちらの記事もご覧ください。
直交型ロボットとの比較
パラレルロボットとよく比較されるのが直交型ロボットです。直交型はX・Y・Z軸それぞれに独立したアクチュエータを持ち、直線的な動作を得意とします。一方で、パラレルロボットは複数のアームで同時に制御するため、より複雑かつ滑らかな動きが可能です。
両者の違いを以下の表で整理します。
| 項目 | パラレルロボット | 直交型ロボット |
|---|---|---|
| 動作精度 | 非常に高い | 高い |
| 動作速度 | 高速 | 中速 |
| 構造 | 並列リンク構造 | 直線軸構造 |
| 剛性 | 高い | 中程度 |
| 設置スペース | 小さい | 大きくなる傾向 |
| メンテナンス性 | 比較的容易 | 部品点数によって異なる |
このように、それぞれの特性には一長一短があります。大量生産ラインなどで単純な搬送作業を行う場合は直交型が適していますが、高速かつ高精度な組立や検査工程にはパラレルロボットが優位です。
パラレルロボットが選ばれる理由
多くの現場でパラレルロボットが選ばれる理由は、その「性能」と「効率性」にあります。特に食品や医薬品、自動車部品など、高速かつ繊細な取り扱いが求められる分野では、その導入効果は非常に大きいです。
たとえば、食品工場ではコンベア上を流れる商品を瞬時にピックアップし、正確な位置へ配置する必要があります。このような場面では、パラレルロボットの高速・高精度な動作が大きく貢献します。また、省スペース設計も可能なため、限られた工場スペースでも柔軟に導入できます。
パラレルロボット導入による主なメリットは以下の通りです。
- 生産スピードの向上
- 作業精度の安定化
- 人手不足への対応
- 製品品質の均一化
- 設備投資対効果の高さ
これらの理由から、多くの企業が競争力強化の一環としてパラレルロボットを導入しています。今後もさらなる技術進化とともに、その活用範囲は広がっていくでしょう。
パラレルロボットの核心はリンク協調動作|剛性・高速性を生む原理
パラレルロボットとは何か?その基本構造と特徴
パラレルロボットは、複数のアクチュエータ(駆動源)とリンク(連結部品)によって構成されるロボットで、プラットフォームを同時に制御する構造が特徴です。一般的な直列型ロボットとは異なり、各アクチュエータが並列に配置されており、1つの可動部(エンドエフェクタ)を支える形になります。この構造により、高い剛性と精度、そして高速な動作が可能になります。
特に、以下のような特徴があります。
- 高剛性:複数のリンクが同時に力を支えるため、たわみが少ない
- 高速性:軽量な可動部により加減速が速い
- 高精度:誤差が分散されやすく、位置決め精度が高い
このような特性から、パラレルロボットは半導体製造装置や医療機器、さらにはシミュレーターなどの分野で活用されています。
| 特徴 | 内容 |
|---|---|
| 構造 | 複数のアクチュエータとリンクで構成 |
| 可動部 | 軽量で高速移動が可能 |
| 利用分野 | 精密加工、医療、シミュレーションなど |
リンク連動制御の仕組みとその重要性
パラレルロボットの性能を最大限に引き出すためには、「リンク連動制御」が不可欠です。これは、複数のアクチュエータを同時かつ協調的に制御する技術であり、各リンクの動きを正確に同期させることで、高精度な位置決めや姿勢制御を実現します。
例えば、3本のリンクで構成されたデルタ型パラレルロボットでは、それぞれのモーターが独立して動くのではなく、1つの目標位置に向かって3本すべてが連携して動作します。この協調制御によって、滑らかで正確な動きが可能になるのです。
リンク連動制御の主な利点は以下の通りです。
- 誤差補正:1つのアクチュエータに生じた誤差を他で補うことができる
- 動作安定性:全体としてバランスよく力を分散できる
- 精密制御:ミクロ単位での位置決めも可能
このように、高度なリンク連動制御はパラレルロボットの心臓部とも言える存在です。
ロボットアームを現場でプログラミングする際の注意点や解決策については、こちらの記事も参考になります。

剛性・高速・高精度を実現する理由
パラレルロボットが他のロボットと一線を画す最大の理由は、「剛性」「高速」「高精度」の三拍子が揃っている点です。これらはそれぞれ独立した性能ではなく、相互に関係し合いながら全体性能を高めています。
まず剛性についてですが、多数のリンクで可動部を支える構造により、外力によるたわみや振動が抑えられます。これによって、高速移動中でも安定した姿勢保持が可能になります。そして、この安定性こそが高精度な位置決めにつながる要因です。
また、高速性については、可動部(プラットフォーム)が非常に軽量であることから、高加速度・高減速度で移動できます。これによりサイクルタイム(1回あたりの作業時間)が短縮され、生産効率も向上します。
以下は、それぞれの性能とその効果をまとめた表です。
| 性能項目 | 特徴 | 効果 |
|---|---|---|
| 剛性 | 多リンク支持でたわみが少ない | 安定した姿勢保持 |
| 高速 | 軽量可動部+強力アクチュエータ | サイクルタイム短縮 |
| 高精度 | 誤差分散+協調制御 | ミクロ単位での位置決め可能 |
このように、パラレルロボットはその構造的特性と高度な制御技術によって、「剛性・高速・高精度」という理想的な性能バランスを実現しているのです。これらは製造業や医療分野など、高い信頼性と効率が求められる現場で大きな価値を発揮しています。
医療・食品・精密分野で導入進むパラレルロボット|用途別活用法
精密加工分野におけるパラレルロボットの活用
パラレルロボットは、精密加工分野で非常に高い評価を受けています。その理由は、構造上の特性により高い剛性と精度を実現できるからです。たとえば、微細な部品の組み立てやレーザー加工など、ミクロン単位の精度が求められる作業において、パラレルロボットは他のロボットよりも優れた性能を発揮します。
特に電子部品や光学機器の製造現場では、わずかなズレが製品不良につながるため、高速かつ高精度な動作が可能なパラレルロボットが重宝されています。また、複雑な形状のワークを扱う際にも、その柔軟な動作範囲と制御性が大きな強みとなります。
以下は、精密加工分野での主な用途です。
- 微細部品の組み立て
- レーザー切断・溶接
- 高速ピッキング・配置
- 表面検査・測定作業
このように、パラレルロボットは高精度が求められる工程で真価を発揮し、生産性と品質の両立を実現しています。
医療・食品分野での導入事例
医療や食品分野では、安全性と衛生面が最優先されます。パラレルロボットはその構造上、可動部分が少なく清掃しやすいため、クリーンルーム環境にも適しています。さらに、高速かつ繊細な動作が可能であることから、これらの分野でも導入が進んでいます。
医療分野では、手術支援ロボットや薬剤のピッキング・仕分けなどに活用されており、人間の手では難しい繊細な作業を正確にこなします。食品業界では、生鮮食品の選別や包装工程などで使用されており、非接触かつ高速処理によって衛生的かつ効率的な生産ラインを実現しています。
以下に代表的な活用例をまとめます。
| 分野 | 活用例 |
|---|---|
| 医療 | 手術支援、薬剤ピッキング |
| 食品 | 生鮮食品選別、包装ライン |
| 製薬 | 錠剤仕分け、自動充填 |
このように、パラレルロボットは人手不足や衛生管理が課題となる現場で、大きな力を発揮しています。
自動化事例と今後の展望
製造業全体で自動化ニーズが高まる中、パラレルロボットはその中心的存在となっています。特に短時間で大量処理が求められる工程では、その高速性と正確性が大きく貢献します。たとえば、自動車部品の組み立てや電子機器の検査工程など、多様な現場で導入が進んでいます。
また、AIや画像認識技術との連携によって、より柔軟で高度な自動化が可能になっています。これにより、人間では対応しきれない複雑な判断や繊細な操作も自動化できるようになり、生産効率と品質向上を同時に実現できます。
主な自動化事例
- 電子基板への部品配置
- 自動車部品の高速組み立て
- 製品検査ラインでの欠陥検出
- 梱包・仕分け工程の無人化
今後はさらに多様な業界への応用が期待されており、省人化・省力化を推進する重要な技術として注目されています。企業にとってはコスト削減だけでなく、人材不足への対応策としても有効です。
パラレルロボット導入基準と設置条件を比較
パラレルロボットの可搬重量の基準とは?
パラレルロボットを導入する際、まず注目すべきは「可搬重量」です。これはロボットが持ち上げたり移動させたりできる最大の重さを指し、作業内容に応じた選定が必要です。適切な可搬重量を選ばないと、ロボットの性能を十分に発揮できず、生産性が低下する恐れがあります。
たとえば、食品や医薬品など軽量物のピッキング作業では、1〜5kg程度の可搬重量で十分です。一方、自動車部品や金属加工品などを扱う場合は、10kg以上の可搬能力が求められることもあります。過剰なスペックを選ぶとコストが無駄になりますし、逆に不足していると故障や事故の原因にもなります。
以下に用途別の可搬重量目安をまとめました。
| 用途 | 推奨可搬重量 |
|---|---|
| 食品・医薬品ピッキング | 1〜3kg |
| 電子部品組立 | 2〜5kg |
| 自動車部品ハンドリング | 5〜15kg |
| 重量物の高速仕分け | 10〜20kg |
このように、用途に応じた適正な可搬重量を見極めることが、パラレルロボット導入成功の第一歩です。
ロボットアーム全般のメーカー比較や選定基準については、こちらの記事でも詳しく解説しています。

精度と速度のバランスが重要な理由
パラレルロボットは、その構造上、高速かつ高精度な動作が可能です。しかし、精度と速度はトレードオフの関係にあるため、どちらを優先するかは導入目的によって異なります。たとえば、電子部品の組立ではミリ単位以下の精度が求められますが、それほど高速である必要はありません。一方で、物流センターなどでは秒単位で大量処理するため、高速性が重視されます。
以下に代表的な用途ごとの精度・速度要件を示します。
| 用途 | 必要な精度 | 必要な速度 |
|---|---|---|
| 電子部品組立 | ±0.01mm以下 | 中速(30〜60回/分) |
| 食品ピッキング | ±0.1mm程度 | 高速(100回/分以上) |
| 自動車部品ハンドリング | ±0.05mm程度 | 中速(50〜70回/分) |
このように、精度と速度のバランスを見極めることで、無駄なく効率的な運用が可能になります。導入前には必ず現場ニーズを明確化し、それに合ったスペックを選定しましょう。
設置条件による制約と最適化ポイント
パラレルロボットはその構造上、省スペースで設置できるという利点がありますが、それでも設置環境によって性能に差が出ることがあります。特に注意すべきなのは「床面強度」「振動」「温湿度」などの物理的条件です。これらが不適切だと、精度や寿命に悪影響を及ぼす可能性があります。
また、制御装置やセンサー類との接続スペースも考慮する必要があります。狭い場所への設置ではケーブル配線やメンテナンス性にも配慮しなければなりません。
設置時に確認すべき主なポイントは以下の通りです。
- 床面強度:本体+最大荷重に耐えられるか
- 振動環境:周囲機器からの振動影響はないか
- 温湿度:メーカー推奨範囲内か
- 電源・通信:必要なインフラが整っているか
- メンテナンススペース:点検・修理作業が可能か
これらを事前にチェックし最適化することで、パラレルロボットはその性能を最大限発揮できます。導入後のトラブル防止にもつながるため、設置環境の確認は非常に重要です。
パラレルロボットは高速・高精度に強み|スカラ・多関節シリアル型との違い
パラレルロボットとスカラ・多関節シリアル型の基本構造の違い
産業用ロボットを選定する際、パラレルロボットとスカラ・多関節シリアル型ロボットの構造的な違いを理解することは非常に重要です。なぜなら、構造が異なれば得意とする作業や導入すべき現場も変わってくるからです。
パラレルロボットは、複数のアクチュエータが並列に配置されており、プラットフォームを同時に制御する構造を持ちます。一方、スカラや多関節シリアル型は、アームが直列に接続されており、各関節が順番に動作します。この構造の違いが、それぞれのロボットの動作精度や可搬重量、速度性能に大きく影響します。
以下に、両者の基本的な構造と特徴を比較した表を示します。
| 項目 | パラレルロボット | スカラ・多関節シリアル型 |
|---|---|---|
| 構造 | 並列リンク構造 | 直列リンク構造 |
| 動作精度 | 高精度 | 中〜高精度 |
| 可搬重量 | 小〜中程度 | 中〜大程度 |
| 動作速度 | 非常に高速 | 高速 |
| 設置スペース | コンパクト | 比較的大きい |
このように、構造の違いは性能面で明確な差を生み出します。導入前には、自社の用途に合った構造かどうかを見極めることが重要です。
なお、ロボットアーム全般の種類や用途別の選び方については、こちらの記事で詳しく紹介しています。

用途による適性の違い
パラレルロボットとスカラ・多関節シリアル型ロボットは、それぞれ得意とする用途が異なります。目的に応じて適切なタイプを選ぶことで、生産効率や品質向上につながります。
パラレルロボットは、高速かつ高精度な動作が求められる用途に適しています。たとえば、電子部品のピッキングや医薬品の仕分けなど、軽量物を短時間で正確に移動させる工程で力を発揮します。一方で、可搬重量には制限があるため、大型部品の搬送には不向きです。
一方、スカラや多関節シリアル型は、より広範囲な動作や重い物体の取り扱いが可能です。組立工程や溶接作業など、多方向からアプローチする必要がある作業に適しています。また、可搬重量も比較的大きいため、自動車部品など重量物にも対応できます。
以下は主な用途別の適性比較です。
パラレルロボットに適した用途
- 高速ピッキング
- 軽量部品の整列
- 医薬品・食品分野での仕分け
- スカラ・多関節シリアル型に適した用途:
- 組立ラインでのネジ締め
- 重量物の搬送
- 多方向からの溶接・塗装
このように、それぞれの特性を活かした使い分けが、生産現場での最適化につながります。
精度・速度・可搬重量による選定ポイント
ロボット導入時には、「精度」「速度」「可搬重量」の3つの要素が選定基準として非常に重要です。これらは製品品質や生産性に直結するため、自社ニーズとのマッチングが不可欠です。
パラレルロボットは、その並列構造によって高い剛性と精度を実現しています。特にミクロン単位での位置決めが求められる工程では、その性能が大きなメリットとなります。また、高速動作にも優れており、サイクルタイム短縮にも貢献します。ただし、可搬重量には限界があり、おおむね数kgまでが一般的です。
一方、多関節シリアル型は柔軟性と可搬能力に優れており、10kg以上の重量物も扱えるモデルがあります。精度面ではパラレル型には劣るものの、多方向から複雑な動きを必要とする工程ではその真価を発揮します。
以下は選定時に考慮すべきポイントです。
| 選定基準 | パラレルロボット | スカラ・多関節シリアル型 |
|---|---|---|
| 精度重視 | ◎(高精度) | ○(中〜高精度) |
| 速度重視 | ◎(非常に高速) | ○(高速) |
| 可搬重量重視 | △(軽量物向け) | ◎(中〜重量物対応) |
このように、自社製品や工程内容によって最適なロボットタイプは異なります。導入前には必ず現場ニーズとの整合性を確認しましょう。
導入コストとメンテナンス性
最後に見逃せない要素として、「導入コスト」と「メンテナンス性」があります。初期投資だけでなく、長期的な運用コストも含めて検討することが重要です。
一般的にパラレルロボットは構造が複雑であるため、本体価格や制御装置も高価になりがちです。また、高速動作による摩耗も早く、定期的なメンテナンスが必要となります。ただし、省スペース設計であるため、設置コストや工場内スペース削減という面では有利です。
一方、多関節シリアル型は市場でも広く普及しており、価格帯も比較的安定しています。部品交換や保守対応も容易であり、長期運用時のトータルコストでは優位になるケースもあります。
以下はコスト面で比較したリストです。
| ロボット種類 | 初期費用 | メンテナンス頻度 | 設置スペース |
|---|---|---|---|
| パラレルロボット | 高め | 高 | 小 |
| スカラ・多関節シリアル型 | 中程度 | 中〜低 | 中〜大 |
このように、導入コストだけでなく運用後の維持管理まで含めた総合的な視点で選定することが成功への鍵となります。
省スペース設計の利点
工場や研究施設では限られたスペースで多くの機器を配置しなければならないため、省スペース性は重要な要素です。パラレルロボットはその構造上、非常にコンパクトに設計できるという利点があります。
特に天井から吊り下げるタイプやテーブル上で完結するモデルなど、小さな設置面積で広範囲な作業領域を確保できる点が魅力です。これにより、生産ライン全体の設計自由度が高まり、省スペース化によるコスト削減にもつながります。
以下は、省スペース化による具体的なメリットです。
- 設置面積が小さいため、生産ラインを柔軟に構築可能
- 他設備との干渉リスクが低減
- メンテナンススペースも最小限で済む
このように、省スペース設計は単なる物理的利点だけでなく、生産効率や運用コストにも好影響を与える重要な要素です。
パラレルロボットはAIで次の段階へ|小型化と海外展開を見据えた技術動向
AIとの連携によるパラレルロボットの進化
パラレルロボットは近年、AIとの連携によって飛躍的な進化を遂げています。従来は単純な動作の繰り返しに特化していたパラレルロボットですが、AIを組み合わせることで、より柔軟で高度な判断が可能になりました。これにより、製造業だけでなく医療や食品加工など多様な分野での活用が広がっています。
たとえば、AIが画像認識を行い、対象物の位置や形状をリアルタイムで把握することで、パラレルロボットはその情報をもとに最適な動作を即座に実行できます。これにより、従来のような事前プログラムに頼らずとも、高精度かつ高速な作業が可能になります。
以下は、AI連携による主なメリットです。
- 作業精度の向上(ミリ単位の誤差補正)
- 柔軟な対応(異なる製品への即時対応)
- 稼働効率の改善(ダウンタイムの削減)
このように、AIとの融合はパラレルロボットの可能性を大きく広げており、今後もさらなる進化が期待されます。
小型化による導入ハードルの低下
パラレルロボットの小型化は、導入コストや設置スペースの課題を解消し、多くの中小企業にも利用可能な技術へと変貌させています。従来、大型で高価だったため一部の大企業に限られていた導入が、小型モデルの登場により一気に広がりを見せています。
小型化されたパラレルロボットは、省スペースで設置できるだけでなく、消費電力も抑えられ、メンテナンスも簡易になるという利点があります。これにより、生産ラインへの柔軟な組み込みが可能となり、多品種少量生産にも対応しやすくなりました。
以下は、小型パラレルロボット導入による主な利点です。
| 項目 | 内容 |
|---|---|
| 設置スペース | コンパクト設計で狭い場所にも対応可能 |
| コスト | 初期投資・運用コストともに低減 |
| 運用柔軟性 | 生産ライン変更時も容易に再配置可能 |
| メンテナンス性 | 部品数が少なく保守作業も簡単 |
このように、小型化は企業規模を問わず導入しやすい環境を整え、製造現場全体の自動化推進に貢献しています。
海外競争状況と日本企業の立ち位置
グローバル市場では、中国やドイツなどがパラレルロボット開発で急速に台頭しており、日本企業は厳しい競争環境に直面しています。特に中国メーカーは価格競争力とスピード感を武器に市場シェアを拡大しており、日本企業との差別化が求められています。
一方、日本企業は高精度・高信頼性という強みを持ち続けており、高付加価値市場では依然として優位性があります。特に医療や精密機器分野では、日本製パラレルロボットへの信頼は厚く、品質重視の顧客層から支持されています。
以下は主要国ごとの競争ポイントです。
| 国・地域 | 強み | 課題 |
|---|---|---|
| 日本 | 高精度・高信頼性 | 価格競争力・開発スピード |
| 中国 | 低価格・量産体制 | 品質・長期耐久性 |
| ドイツ | 技術革新・産業連携 | 柔軟性・コスト面 |
このような国際競争下で、日本企業が生き残るには、「高品質×AI連携×小型化」という三位一体の戦略が不可欠です。今後も技術革新と市場ニーズへの迅速な対応が求められるでしょう。
パラレルロボットの導入時によくある質問と回答集|FAQ
- パラレルロボットの設置面には特別な強度が必要ですか?
はい。構造上、複数のアクチュエータが同時に動作し剛性が高いため、床の水平精度や振動対策が重要です。特に高速動作では、たわみが精度低下の原因になります。
- パラレル型はリンクの長さ変更で精度調整できると聞きましたが本当ですか?
概ね正しいです。リンク長の微調整や補正値設定によって、エンドエフェクタの動作軌道や姿勢を精密に調整できます。ただし高精度校正には専用治具や補正手順が必要です。
- パラレルロボットの干渉チェックはどう行えば良いですか?
パラレル構造は可動範囲が非線形かつ多軸連動のため、従来型より干渉リスクの判断が複雑です。専用シミュレーションソフトや3D CAD連携での事前検証が推奨されます。
- 速度を上げても精度が落ちにくいのはなぜですか?
パラレル型は可動部が軽く、かつ複数リンクによる剛性支持構造のため、加減速時の振動やたわみが少なく、速度と精度を両立しやすい設計になっています。
- ワークの下にロボットを設置する“逆さ吊り”構成は可能ですか?
はい、可能です。天吊り型やテーブル下設置型など、上から手を伸ばす形の構造も存在します。省スペース化と清掃性向上を両立できる場合があります。
- 複数のパラレルロボットを同一ラインに並べることはできますか?
できますが、制御タイミングの干渉回避と通信帯域の確保が重要です。高精度用途ではそれぞれの原点補正や外部基準との同期精度もチェックすべきです。
- AIや画像認識との相性はどうですか?
非常に良好です。パラレルロボットはXY方向への素早い位置補正が得意で、画像処理で取得したピッキング位置とのリアルタイム連携に向いています。
- 多関節ロボットと違って“死角”ができやすいと聞いたのですが?
パラレル構造は作業エリアが円錐形(ドーム状)になることが多く、Z軸方向の動作範囲に制限があるモデルもあります。配置やワーク形状によっては“届かない領域”が発生します。
- 長期稼働時に特に注意すべき摩耗箇所はどこですか?
一般的にリンク接続部のベアリングやユニバーサルジョイントが摩耗しやすいです。高速・高頻度動作では定期的なガタつきチェックが不可欠です。
- 既存のパラレルロボットに新しいリンク制御アルゴリズムを導入できますか?
メーカーや制御ソフトの仕様によりますが、ファームウェア更新や制御モジュール交換で最新アルゴリズム(例:動的誤差補正)を導入できる場合もあります。事前確認が必要です。
まとめ|パラレルロボットの導入メリットと将来性
パラレルロボット導入によるメリット
パラレルロボットを導入する最大のメリットは、生産性の大幅な向上です。高速かつ正確な動作により、従来よりも短時間で多くの作業をこなすことができ、人手不足やコスト削減にも貢献します。
また、繰り返し精度が高いため、不良品率の低下にもつながります。これは品質管理の面でも大きな利点です。さらに、軽量でコンパクトな設計は、省スペース化を実現し、既存ラインへの組み込みも容易です。
導入メリットを以下にまとめます。
- 生産スピードの向上
- 作業精度・品質の安定
- 人件費・運用コストの削減
- 設備スペースの最適化
- 柔軟なライン変更への対応力
これらの利点から、多くの企業が競争力強化を目的としてパラレルロボットを積極的に採用しています。
導入事例から見る活用シーン
実際にパラレルロボットを導入している企業では、その効果が明確に表れています。たとえば食品業界では、お菓子やパンなど軽量物のピッキング・整列作業に使用されており、人手では難しい高速処理を実現しています。
また、電子部品メーカーでは、小型部品の組み立てや検査工程に活用されており、高精度な位置決めによって製品品質を安定させています。医薬品分野でも無菌環境下での包装作業など、人手によるリスクを回避する用途で重宝されています。
代表的な活用シーン
| 業界 | 活用内容 |
|---|---|
| 食品 | ピッキング・整列・包装 |
| 電子部品 | 組み立て・検査 |
| 医薬品 | 無菌包装・軽量物搬送 |
| 化粧品 | 容器詰め・キャップ締め |
このように、多様な業界で柔軟に対応できる点も、パラレルロボットの大きな魅力です。
パラレルロボット市場の今後と展望
近年、自動化ニーズの高まりとともに、パラレルロボット市場は急速に拡大しています。特にアジア圏では人件費上昇や労働力不足への対策として導入が進んでおり、日本国内でも中小企業による採用事例が増加傾向です。
さらにAIやIoTとの連携によって、より高度な制御や予知保全も可能となり、スマートファクトリー化への貢献も期待されています。今後は食品・医薬品だけでなく、自動車部品や物流分野への展開も見込まれています。
今後注目される市場動向
- 中小企業への普及拡大
- AI連携による自律制御技術の進化
- ローカル生産体制への対応力強化
- サステナブル生産への寄与
このように、パラレルロボットは単なる省力化ツールではなく、「未来型ものづくり」の中核を担う存在として、その価値を高め続けています。