
「コストを抑えて2D SLAMで導入したが、段差や人の往来に対応できず、結局止まってばかり…」
「高性能な3D SLAMを選んだものの、オーバースペックで費用対効果が見合わない」
SLAM方式AMRの導入でよく聞かれる、こんな後悔。実は、2Dと3D、どちらが良いという単純な話ではありません。成功の鍵は、自社の「現場環境」と「求める精度」に応じて、両者を正しく“使い分ける”ことにあります。
本記事では、その判断基準を明確にするため、2Dと3Dの技術的な違いから、現場別の適合性、そして見落としがちなコスト構造までを徹底比較。「あなたの現場の最適解」を導き出すための、実践的な選定ガイドです。
そもそもSLAMとは何か?AMRが正確に動くための基本と応用を解説
AMR(自律移動ロボット)が自律的に正確な走行を行うためには、「SLAM」の理解が欠かせません。このパートでは、SLAM技術そのものの役割と構造、2Dと3Dの違いを具体的に深掘りしながら、“なぜこの技術が必要なのか”を実感できるよう解説していきます。
SLAMとは?なぜAMRに不可欠なのか
自律移動ロボット(AMR)において、SLAM(Simultaneous Localization and Mapping)は不可欠な中核技術です。名前の通り、「自己位置の推定(Localization)」と「環境地図の生成(Mapping)」を同時に行う仕組みであり、GPSが使えない屋内空間での自律移動を実現するうえで欠かせません。
たとえば、AMRが施設内を自律走行するには、「今どこにいて」「どこへ向かい」「どう動けばよいか」をリアルタイムで把握する必要があります。SLAMはその全てを可能にする技術基盤です。逆に言えば、SLAMがなければAMRは迷子になり、障害物にぶつかり、正確な搬送やルート最適化が不可能になります。
SLAMの基本構造
SLAMがどのような処理をリアルタイムで行っているかを、イラストで示します。
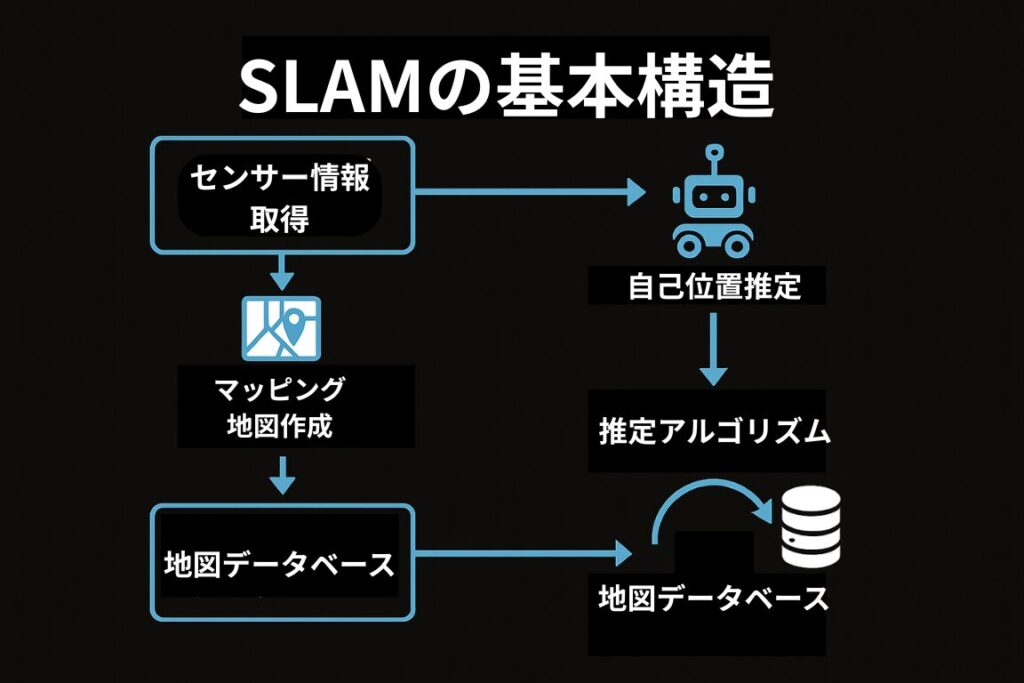
SLAMは単なる地図作成ではなく、常に自分の位置を推定しながら、地図と位置情報を相互に更新し続ける「循環的プロセス」です。これにより、未知の環境でも進行方向を判断し、適切なルート選択・障害物回避が可能になります。
このように、SLAMはAMRのナビゲーション・自己位置補正・空間認識の全てを支える土台です。

Factory DX
運営事務局
特に物流・製造・医療・屋外構内搬送といった現場では、SLAMの精度がAMRの安全性・業務効率を左右すると言っても過言ではありません。
自己位置推定+地図生成の同時処理とは
SLAM(Simultaneous Localization and Mapping)とは、ロボットが自分の現在位置を把握しながら、同時に地図を作成する技術です。これは、人間でいえば「初めて入った建物内で、自分が今どこにいるかを意識しながら、頭の中に見取り図を描いていく」ような行動に近いものです。
AMRはこのSLAMを活用することで、未知の環境でも壁や障害物の位置を把握し、安全かつ効率的に移動できます。GPSが使えない屋内でも、リアルタイムなナビゲーションが可能となるため、工場や倉庫、病院や商業施設といったさまざまな現場で導入が進んでいます。
AMRにおけるSLAMの役割と期待効果
SLAMの質は、そのままAMRの性能を左右します。SLAMの地図作成が粗く、自己位置の誤差が大きければ、AMRは通れない場所を突き進んだり、通路の真ん中で止まってしまったりといったトラブルを引き起こします。逆に、精度の高いSLAMが実装されていれば、複雑なレイアウトの工場や動線が混雑する施設内でも、スムーズな搬送や清掃が実現できます。
特に、床に段差や傾斜がある現場、障害物の配置が日々変化する現場では、SLAMの能力が信頼性のすべてを決めるといっても過言ではありません。
2D SLAMと3D SLAMの構造比較
2Dと3DのSLAMでは、「見ている世界」が根本的に異なります。それはセンサー構成の違いから始まり、データ処理のアルゴリズム、生成されるマップの精度や使い方に至るまで、幅広く影響します。以下では、2026年現在の最新技術トレンドを踏まえ、両者の技術的構成要素と運用面での違いを具体的に見ていきます。
センサー構成(LiDAR/ステレオカメラ/IMU)
以下の表は、2D SLAMと3D SLAMで使用される代表的なセンサー構成の違いを整理したものです。使用するハードウェアの違いが、そのまま対応可能な環境の違いにも繋がります。
| センサー種別 | 2D SLAMで使用 | 3D SLAMで使用 |
|---|---|---|
| 2D LiDAR | ◯(主役) | △(死角の補助用) |
| 3D LiDAR | × | ◎(主役) |
| ステレオ/RGB-Dカメラ | × | ◯(Visual SLAM用) |
| IMU(慣性センサー) | △(補助) | ◎(必須) |
2D SLAMは、水平1方向にのみレーザーを照射する2D LiDARが主役であり、システム構成が軽量です。一方、3D SLAMは高さ・奥行きの立体情報を取得するため、全周囲をスキャンできる3D LiDARと、機体の傾きや加速度を検知するIMU(慣性センサー)を統合して使用します。
【2026年現在の重要アップデート】
数年前まで、3D LiDARは1台数十万〜数百万円と極めて高価でしたが、現在は非回転式(ソリッドステート型)技術の成熟により劇的な価格破壊が起きています。
例えば、AMRの実証実験や実装でデファクトスタンダードとなっている「Livox Mid-360」などの高性能3D LiDARは、現在10万円前後で調達可能です。ハードウェア原価の差が縮小したことで、「3D SLAM=高コスト」という常識は過去のものになりつつあります。
AMRに搭載されるLiDARの仕組みや障害物検知の精度については、こちらの記事も参考になります。

アルゴリズム・処理方式の違い(FAST-LIO2など)
アルゴリズムと演算負荷の面でも、近年最も大きな技術的ブレイクスルーが起きています。
2D SLAMでは、GmappingやCartographerといった2D平面に最適化された軽量なアルゴリズムが長年使われてきました。対して、従来の3D SLAM(RTAB-Mapなど)は点群処理が重く、「3Dは高性能なGPUや高価なPCが不可欠」とされていました。
しかし現在、3D LiDARを用いたSLAMアルゴリズムの主流は『FAST-LIO2』や『LIO-SAM』といったLIO(LiDAR-Inertial Odometry)技術に完全に移行しています。これらの最新アルゴリズムはデータ処理が極めて最適化されており、高価なGPUは一切不要です。一般的なIntel Core i7などのCPUはもちろん、安価なARMベースの組み込みボード(Raspberry Piなど)でも、100Hz(秒間100回)以上の超高速リアルタイム処理が可能になっています。
※カメラ映像からAIによる物体認識を行う「Visual SLAM」を採用する場合は現在もGPUが必要なケースがありますが、LiDARベースの3D SLAMにおいては、処理負荷の課題はほぼ解消されています。
マップ活用の違い|2Dと3Dの出力例
以下の表は、SLAMによって生成されるマップの形式と、現場での活用方法の違いを整理しています。
| 出力マップ | 2D SLAM | 3D SLAM |
|---|---|---|
| 表現形式 | 平面マップ(白黒の2Dグリッド図) | 3D点群マップ(立体のメッシュデータ) |
| 利用用途 | 基礎的な経路計画、平面上の障害物回避 | 高精度ナビゲーション、段差・空間認識、自己位置の高速補正 |
| 可視化イメージ | 建物のシンプルな見取り図・平面図 | 現場の立体構造や設備高さを丸ごと再現したデジタル空間 |
2Dマップは、壁や柱の位置を認識するには十分で、狭く平坦な環境での経路制御には適しています。しかし、3Dマップは段差やスロープ、天井から吊り下がる配線、机の出っ張りなど、2Dでは見落とす立体構造を認識できるため、複雑な環境や動的な変化が多い現場で極めて有効です。これにより、AMRの誤作動や衝突リスクが劇的に低減されます。
失敗事例から学ぶ、導入前に確認すべき要件と見落としポイントを整理。
「なぜ失敗するのか」が分かることで、対策が明確になります。
無駄なコストや手戻りを防ぐためにも、事前確認が不可欠です。
→ 失敗しないための導入チェックリストを無料で見る
空間把握・自己位置誤差の数値事例
一般的なAMR用途で使用されているSLAM方式における、代表的な精度指標は以下のとおりです。これは、倉庫や製造業、医療施設などでの実用値や導入事例をもとにした参考値です。
以下の表では、2D SLAMと3D SLAMにおける主要な精度項目について、2026年現在の製造・物流現場で主流となっている「ハイブリッド方式」を含めて数値ベースで比較・整理しています。
| 精度項目 | 2D SLAM(自然特徴のみ) | 2D SLAM(ハイブリッド方式※) | 3D SLAM(LiDAR+IMU) |
|---|---|---|---|
| 自己位置誤差 | ±2〜5cm | ±0.5〜1.0cm | ±0.5〜1.5cm |
| 地図の詳細度 | 中(壁・柱などの平面構造) | 中(壁・柱などの平面構造) | 高(棚・机の出っ張り・立体物も識別) |
| 障害物回避精度 | 中(低い障害物の見落としあり) | 中(低い障害物の見落としあり) | 高(空間の立体構造まで正確に認識) |
※ハイブリッド方式:基本の走行は2D SLAMで行い、コンベア移載や自動充電など、高精度な停止が求められる特定のポイントにのみ反射板(リフレクター)を設置して精度を補正する運用手法。
わずか数センチの誤差でも、AMRの走行パスが壁際に寄りすぎる、障害物に異常接近する、あるいは狭い通路でのすれ違い時に他機体と干渉するなどの実害につながります。特に、コンベアや自動倉庫との無人連携(ドッキング)においては、ミリ単位のズレが重大なシステムエラーを引き起こします。
純粋な2D SLAMのみで運用した場合、自己位置誤差は±2〜5cm程度生じるのが現実です。しかし、現在の産業用AMRにおいてはこの弱点を補うため、設備連携箇所にだけ反射板を追加する「ハイブリッドナビゲーション」が標準的となっており、これにより2Dベースでも局所的に±1cm以下の高精度な停止を実現できます。
一方、3D SLAMの最大の強みは、空間の立体的な点群データと最新のLIO(LiDAR-Inertial Odometry)アルゴリズムにより、「反射板などのインフラ設備を一切追加することなく」エリア全域で自然に±1cmレベルの超高精度を叩き出せる点にあります。
そのため、「レイアウト変更が頻繁に発生する」「広大な空間で反射板の設置・管理の手間をゼロにしたい」という現場であればインフラレスな3D SLAMが圧倒的に有利です。逆に、「レイアウトが固定化されており、指定箇所への反射板設置が許容できる」のであれば、ハイブリッド型の2D SLAMでも十分な費用対効果を発揮します。
精度を左右する要因(床材、光、障害物)
マッピング精度はSLAM方式だけで決まるわけではありません。現場の物理的・環境的要因も大きな影響を与えます。以下に主な要因とその影響例を整理します。
- 床材の状態と反射特性
→ 2D LiDARは床面反射に影響されやすく、ツヤの強い床では測定誤差やノイズが生じやすい傾向があります。 - 照明環境(明暗差・フリッカー)
→ 3D SLAMでRGB-Dカメラやステレオカメラを使う場合、光の強さやちらつきが空間把握精度を低下させることがあります。 - 動的要素の多さ(人・台車・フォークリフト)
→ 一時的な遮蔽や構造物の変化に対して、2Dは再マップに弱く、3Dは空間認識力に優れるため、動的環境では3Dが安定します。
これらの要因を事前に調査・評価し、最適なSLAM方式を選定することで、トラブルを未然に防ぎ、長期的な運用安定性を確保することができます。
2D・3D SLAMに関するよくある質問(FAQ)
- 2D SLAMと3D SLAMは具体的にどんな場面で使い分けるべきですか?
導入現場の「環境の複雑性」と「運用変更の頻度」によって判断します。レイアウトが固定された平坦な倉庫や単純な搬送路なら2D SLAMで十分ですが、段差・傾斜がある工場、人の往来が激しい商業施設、レイアウト変更が頻繁な現場では空間認識力に優れる3D SLAMが推奨されます。
- 2D SLAMの精度で本当に問題ないのでしょうか?
単独では±2〜5cm程度の誤差が生じますが、ドッキング箇所等の重要ポイントにのみ反射板を設置する「ハイブリッド方式」を併用すれば、局所的に±1cm以下の高精度を担保できます。ただし、反射板を設置できない環境や、経路上に予期せぬ立体障害物(フォークリフトの爪など)が存在する現場では3Dが安全です。
- 将来的に2Dから3Dにアップグレードできますか?
一部のAMRでは可能ですが、センサー構成や処理系が異なるため、ハードウェア・ソフトウェアの再設計が必要です。
- 3D SLAMはなぜコストが高いのですか?
【2026年現在の実態】 実は現在、「3D SLAM=高コスト」という常識は崩れつつあります。数年前までは1台数百万円の3D LiDARと高性能GPU搭載の車載PCが必要でしたが、ソリッドステート型(非回転式)LiDARの量産化により、高性能な産業用センサーが数万円〜10万円台で調達可能になりました。
アルゴリズムの軽量化により高価なGPUも不要となったため、現在では2D機体とのハードウェア価格差は劇的に縮小しています。
- 屋外で使うなら必ず3D SLAMが必要ですか?
はい、原則として3D SLAM(または高精度なRTK-GNSS等との統合システム)が必要です。屋外は路面の凹凸、スロープ、天候・照度変化など2D LiDARでは対応しきれないノイズが多く、立体空間全体で特徴点を捉える3Dの認識能力が不可欠となります。
- SLAMのマップ生成にはどれくらい時間がかかりますか?
【2026年現在の実態】最新のLIO(LiDAR-Inertial Odometry)アルゴリズムにより、データ処理が最適化された現在では、3D SLAMであってもマップ生成は「AMRが現場を走行するのとほぼ同時(リアルタイム)」に完了します。
数百〜数千平米の施設であっても、機体がルートを一周する時間(数分〜十数分)で高精度な立体マップが完成します。「3Dは地図作成に数時間かかる」というのは過去の制約です。
- AMRが地図を一度作ったあと、環境が変わったらどうなりますか?
大規模な設備レイアウト変更があった場合はマップの再生成(再走行)が必要です。ただし、日々のパレットの増減や一時的な荷物置き場といった日常的な動的変化に対しては、3D SLAMの方が空間全体の特徴点から現在地を割り出せるため、自己位置を見失いにくく稼働が安定します。
- 高精度SLAMは誤作動しないのですか?
どのSLAM方式でも誤差や誤作動リスクはゼロではありません。透明なガラス壁、極端に特徴点のない長い直線通路(長い廊下)、直射日光などの外的ノイズに対してはセンサーが迷うことがあります。現場環境の事前調査と、環境に応じたセンサー選定・キャリブレーションが前提となります。
- AMR導入前に何を準備すればよいですか?
施設図面(CADデータ等)、段差やスロープの有無、Wi-Fi等のネットワーク環境の確認に加え、稼働エリア内における「動的障害物(人、フォークリフト、台車)の通行量」の把握が必要です。これらを事前に整理することで、2D/3Dのどちらが最適かを判断しやすくなります。
- 複数台のAMRを協調運転させる場合、どのSLAM方式が適していますか?
狭い通路でのすれ違いや、交差点での高精度な位置共有が必要になるため、基本的には空間認識力に長けた3D SLAM、あるいは上位のフリート管理システム(FMS)と連携して厳密に経路制御された2D機体が推奨されます。
AMRとSLAMの最適な関係とは?現場環境で差が出る選定ポイントを解説
まず、結論をお伝えすると、屋内の定型環境なら2D SLAMで十分、複雑・変化の多い環境なら3D SLAMが必要です。その理由をくわしく解説します。
AMR(自律移動ロボット)の導入で最も重要なのは、「どのSLAM方式を選ぶか」です。初期段階のこの判断こそが、その後の安定運用・精度・コストのすべてに直結します。多くの現場では「とりあえず2Dから」と考える傾向がありますが、それが“失敗の第一歩”になることも少なくありません。
SLAM方式を誤ると、地図がずれる、AMRが障害物を見落とす、ルート変更に対応できないなど、深刻な運用障害を招きます。逆に言えば、「自社に合ったSLAMを最初に正しく選ぶ」ことができれば、導入後のROI(投資回収率)は飛躍的に向上し、運用負荷も劇的に軽減されます。
その判断基準は、「環境の複雑性 × 精度要件 × コストバランス」の3点です。
- 環境の複雑性とは、段差、動的障害物(人や台車)、屋外要素などを含むかどうか
- 精度要件とは、ミリ単位での自己位置精度や、障害物回避精度の厳しさ
- コストバランスとは、センサー・演算機器・導入構築・保守まで含めた総費用の最適化
現場が単調で構造が固定的ならば、2D SLAMでも安定した運用が可能です。一方で、人やモノが頻繁に動く、構造が入り組んでいる、地形が変化しやすい環境では、3D SLAMの高精度な空間認識能力が不可欠となります。
導入現場のリスクを最小限に抑えながら、最大限の効果を引き出すには、「2Dか3Dか」の選定がすべての起点になるのです。
2D SLAMと3D SLAMの選定比較表
以下は、2D SLAMと3D SLAMの主要な違いを一目で比較できる表です。
ユーザーが「自分の現場ではどちらが最適か」を直感的に判断できるよう、センサー構成・対応環境・精度・導入コストなど、実務上重要な観点を網羅しています。2026年現在の最新の技術動向を反映しアップデートしています。
| 比較項目 | 2D SLAM | 3D SLAM |
|---|---|---|
| センサー構成 | 2D LiDAR(単一平面) | 3D LiDAR、IMU(慣性センサー)、ステレオカメラ等 |
| マッピング精度 | 約±2〜5cm (※反射板の併用で局所的に±1cm以下) | 約±1cm未満 (※反射板などのインフラ追加なしで空間全体を認識) |
| 対応環境 | 単調な屋内、平坦で整備された床面、レイアウト変化が少ない環境 | 複雑な屋内、段差・スロープあり、人流やレイアウト変化が多い環境、屋外 |
| 処理負荷 | 低(一般的なCPUで可) | 低〜中(※最適化によりGPU不要。一般的なCPUで高速処理可) |
| ハードウェア導入コスト | 比較的低コスト | 2Dとの価格差は激減(3Dセンサーの低価格化により導入ハードルが大幅低下) |
| メリット | 軽量・低コスト・実績が豊富で安定性が高い | 高精度・複雑な空間や環境変化に強い・ルート変更が極めて柔軟 |
| デメリット | 段差や下方の障害物に弱い・環境変化で迷子になりやすい・高精度化には反射板工事が必要 | 2Dに比べると取得するデータ(点群)が大きいため、ネットワークや保守の設計に知見が求められる |
この表は、あくまで「一般的な傾向」としての参考値ですが、2026年現在において最も注目すべきは「処理負荷」と「導入コスト」の劇的な変化です。
数年前までは「3D SLAM=高価なセンサーと重い演算処理(GPU)が必須で、機体価格が数百万円跳ね上がる」という常識がありました。しかし現在は、数万円〜10万円台で高性能な3D LiDARが調達できるようになり、最新アルゴリズムの恩恵によって高価なGPUを積まずともサクサク動くようになっています。
実際の選定では、現場の床材、障害物の密度、稼働時間帯の人流などを踏まえて、現場実証やPOC(概念実証)を行った上で判断することが推奨されます。
なお、初期コストの安さだけで2D SLAMを選び、結果的に「ルート上に置かれた段ボールを避けられない」「レイアウト変更のたびに地図や反射板を作り直す手間がかかる」といった予期せぬ運用負荷を抱えるケースは少なくありません。現在ではハードウェアの価格差が縮まっているため、マップ修正の手間やダウンタイムの少なさを含めた「中長期的な運用コスト(TCO)」を見据えると、最初から3D SLAMを選んだ方が結果的に安くつくケースも増えている点に注意が必要です。
なお、AMRにおける自己位置推定とマッピングの仕組みそのものについて基礎から知りたい方は、『AMRのマッピング機能とは?自己位置推定と地図生成の仕組みをわかりやすく解説』をご参照ください。

なぜAMRは2Dと3Dで動きが変わるのか?SLAM方式の構造的違いに迫る
2D SLAMと3D SLAMでは、使用されるセンサーの種類、取得できる情報の次元数、処理アルゴリズムの最適化度合い、結果としてのマッピング精度や自己位置推定の精度において大きな違いがあります。
2D SLAMは、主に水平1層のLiDARで床面の障害物や壁などを検出し、平面的な地図(2Dグリッドマップ)を作成する技術です。一方、3D SLAMは高さや奥行き情報も含めた空間全体を3次元で把握し、立体的な点群マップを生成します。
ここで本質的に異なるのは、「認識できる情報量と構造の複雑さへの対応力」です。
例えば、段差や傾斜、フォークリフトの爪、天井からぶら下がる配線などは、平面しか見えない2D SLAMでは認識できず、AMRの誤動作や衝突の大きな原因になります。これに対し、3D SLAMでは全周囲の高さ方向も含めて空間全体をスキャンするため、立体的な障害物を確実に捉え、より安全で高精度な回避動作が可能になります。
また、以前は「2Dは処理が軽く、3Dは点群データの計算量が膨大なため高性能なCPUや高価なGPUが必須」とされていました。しかし現在、この常識は大きく覆っています。
2026年現在の最新3D SLAM(FAST-LIO2など)は、アルゴリズムの劇的な軽量化と最適化により、膨大な点群データを「一般的なPC向けCPUや、安価な組み込み用プロセッサ」でもリアルタイムかつ高速に処理できるようになりました。高価なGPUを搭載しなくても、100Hz(秒間100回)以上の高速演算で自己位置を補正し続けることが可能です。
Factory DX
運営事務局
このように、センサーが取得する「次元(情報量)」の違いがAMRの空間認識力を決定づけますが、かつてハードルとなっていた「3Dの処理負荷(PCスペックの要求)」は技術進化によってほぼ解消されており、より手軽に高精度な3D SLAMを現場に実装できる環境が整っています。
AMRの動作や制御方式の仕組みをより包括的に理解したい方は、『AMR制御システム完全ガイド|どう動く?何が違う?現場で役立つ判断ポイント』もあわせてご覧ください。
SLAMの基本処理構造
以下の図は、SLAMにおける基本的な情報処理の流れを簡潔に示したものです。2Dと3Dの違いを理解する前提として、どのように情報が取得され、どのように位置と地図が同時生成されるのかを視覚的に整理するのに役立ちます。
[センサー情報取得]
↓
[マッピング(地図作成)] ←→ [自己位置推定]
↓ ↑
[地図データベース] [推定アルゴリズム]この一連の処理は、すべてリアルタイムで行われます。センサーから得られる空間情報をもとに、マップと現在位置が同時に更新されるため、演算能力と情報精度の両方が求められます。
2Dと3Dでは、この処理に使用するデータ構造・演算方式・センサーの種類が大きく異なるため、マッピング結果と対応可能な環境のレベルも異なってくるのです。
SLAMの仕組みをもう少し基礎から理解したい方は、こちらの記事もご覧ください。
AMRに最適なのは2Dか3Dか?現場特性から導く最適解
AMR導入における最初の分岐点、それが「2D SLAMにすべきか、3D SLAMを選ぶべきか」です。この判断が正しければ、導入後の業務効率・安定性・保守コストすべてに良い影響を及ぼしますが、誤れば、ルート誤差、障害物回避失敗、頻繁な再地図化といった“運用上の詰まり”が発生します。
冒頭でもお伝えしましたが、この判断のカギは、大きく3つの要素に集約されます。
- 環境の複雑性(段差、傾斜、人の往来、屋外有無など)
- 求めるマッピング精度(±1cm以下か、数cmで十分か)
- システム予算と保守体制(コストとのバランス)
このセクションでは、判断ミスを防ぐためのチャートと、具体的な現場別マトリクスを活用しながら、「あなたの現場にはどちらが適しているのか」を実感ベースで見極められるようにします。
判断チャート|あなたの現場は2D?3D?
以下のチャートは、現場環境の特徴に応じて適切なSLAM方式を選べるシンプルな判断ロジックです。AMRの初期導入判断やPOC(概念実証)の企画段階で、非常に有効な思考フレームになります。
Q1:障害物や段差が多い環境ですか?
├─ Yes → Q2へ
│ ├─ 周囲環境が動的(人や物が頻繁に動く)ですか?
│ │ └─ Yes:3D SLAMを推奨
│ │ └─ No:2Dでも可能(要検証)
│ └─ 障害物が固定で簡単な構造 → 2Dでも運用可
└─ No → Q3へ
├─ 高精度マッピングが必要ですか?
│ └─ Yes:3D SLAM
│ └─ No:2D SLAMで十分このチャートでは、障害物の構造と動的要素の有無、高精度マッピングの必要性という3つの要素から、最も現場に適したSLAM方式を判断できます。特に、「段差がある」「人が頻繁に動く」「ミリ単位の精度が求められる」といった要件が1つでも該当する場合は、3D SLAMを前提に検討すべきです。
対応環境マトリクス|現場別SLAM適正
このマトリクスは、典型的な5つの現場環境を例に、2D SLAMと3D SLAMの適合性を視覚的に整理したものです。導入担当者が「自分の現場に一番近いのはどこか?」と照らし合わせながら、より具体的な選定判断を行えるように設計しています。
| 環境タイプ | 2D SLAM適正 | 3D SLAM適正 |
|---|---|---|
| 倉庫(棚固定) | ◎ | ◯ |
| 製造工場(段差あり) | △ | ◎ |
| 商業施設(人の往来) | △ | ◎ |
| オフィス内 | ◎ | ◯ |
| 屋外構内搬送 | × | ◎ |
2D SLAMは、構造が単調かつ人の動きが少ない現場(例:棚が固定された倉庫、オフィス内の清掃ロボットなど)において高い適正を持ちます。
一方で、段差や構造物が複雑な工場、人の流れが読みにくい商業施設、屋外の構内搬送といった環境では、3D SLAMの高度な空間認識力が必要不可欠です。
導入失敗を防ぐ、AMRとSLAMの適合性を見極めるポイント
SLAM方式を2Dか3Dかで選ぶ際、単に精度や価格だけで判断してしまうと、運用段階で思わぬ障害や追加コストが発生します。導入前にこそ、現場環境・通信インフラ・運用後のメンテナンス性といった視点から総合的に評価しておくことが重要です。このセクションでは、そのために検討すべき3つの重要ポイントを解説します。
現場適合性(施設図面・段差・照度)
SLAM方式がうまく機能するかどうかは、現場環境の物理的条件に大きく左右されます。
まず確認すべきは「施設構造の図面」です。段差の有無、通路の幅、天井高、機器や人の通行の動線を把握することで、センサーが把握しきれるかを判断できます。2D SLAMでは段差や複雑な構造に弱いため、これらの確認が甘いと、AMRが通れない・地図が作成されないといった不具合が発生します。
また、照度も重要です。3D SLAMでカメラを使う場合、明暗の差や光のちらつき(蛍光灯のフリッカー)によって画像処理精度が落ちる可能性があります。照度の安定性も事前に確認すべきです。
SLAMとインフラの親和性(5G/Wi-Fi、クラウド)
高精度なSLAMを安定稼働させるためには、通信環境(インフラ)との役割の「正しい切り分け」を理解しておくことが非常に重要です。ここで多くの導入担当者が誤解しがちなのが、「3D SLAMのようなデータ量の多い処理はクラウドで行うため、常に5Gや高速Wi-Fi環境が必須になるのでは?」という点です。
2026年現在、安全性と遅延(レイテンシ)を担保する観点から、2D・3Dを問わず、AMRの自己位置推定や障害物回避といった「リアルタイムのSLAM制御」は、100%エッジ処理(AMR車載PC内)で行うのが絶対的なルールとなっています。万が一Wi-Fiが途切れた瞬間にAMRが暴走・衝突するリスクを排除するため、走行に直結するコア処理をクラウドに依存することはありません。
では、なぜ5GやWi-Fiといった通信インフラが重要視されるのでしょうか。
それは、複数台のAMRを統合制御する「フリート管理システム(FMS)」との連携、他機体が作成した「3D点群マップの共有・バックアップ」、大域的な「経路指示」、そしてエレベーターや自動ドア・コンベア等との「設備連携」を行うためです。これらの上位システムとのやり取りにおいて、大容量かつ安定した通信インフラが不可欠になります。
したがってインフラ設計においては、SLAMの処理場所をどうするかではなく、この「統合管理システム(FMS)をオンプレミス型(自社サーバー)にするか、クラウド型にするか」という選択が重要になります。一時的な通信障害時にもAMRが安全に現在地を保って待機・自律復帰できるフェールセーフ(フォールバック)設計や、機密情報を含むマップデータのセキュリティ要件も含めて、現場のネットワーク環境を整備しておく必要があります。
メンテナンス性とアップデート可否
SLAM技術は進化が速く、特に3D SLAMはアップデートの頻度も高いため、将来の運用体制も視野に入れておく必要があります。
AMRが一度マッピングした環境が、その後変更されるケースは少なくありません。機器のレイアウト変更、仮設の障害物、人流の変化などがあれば、マップの再生成が必要になります。
Factory DX
運営事務局
その際、センサーのキャリブレーション、アルゴリズムの再学習、再地図化の運用負荷をどこまで許容できるかが、事前検討の重要な視点です。
また、ベンダーによってはマップ生成や更新の作業がブラックボックス化している場合もあります。できる限り、現場側でも柔軟にメンテナンスやアップデート対応ができる体制を整えておくことが望ましいです。
コスト vs 精度の対比図(目安)
SLAM方式選定において、精度や構成だけでなく「費用対効果」も重要な判断軸です。以下の表では、代表的なシステム構成(ハードウェア単体)に対するおおよその導入費用と期待精度、適用シーンの例を示しています。
| システム構成例 | 導入費用目安(ハードウェア単体) | 精度レベル(相対) | 適用シーン例 |
|---|---|---|---|
| 2D SLAM + 基本2D LiDAR | 20〜50万円 | 中(±2〜5cm程度 ※反射板なしの場合) | レイアウトが固定された平坦な倉庫、単調な屋内搬送 |
| 3D SLAM + 3D LiDAR + IMU | 50〜100万円 | 高(空間全体で±1cm未満) | 段差・スロープがある工場、人流の多い病院・商業施設、屋外構内、レイアウト変更が頻繁な現場 |
※上記はあくまで「SLAM構成部分のハードウェア費用目安」であり、AMRの車体やバッテリー、上位の統合管理システム(FMS)費用は含んでいません。
表からも分かる通り、かつて「150万円以上かかる高嶺の花」とされていた3D SLAM構成ですが、ソリッドステート型3D LiDARの量産化による劇的な価格破壊により、現在では2D構成との価格差が数万円〜数十万円程度にまで縮小しています。AMR車体全体の導入価格(数百万円〜)から見れば、SLAM方式による初期費用の違いは誤差の範囲になりつつあります。
導入費用の目安はあくまで参考値ですが、単純なイニシャルコストだけで「とりあえず安い2Dで」と判断するのは危険です。精度不足や空間認識力の欠如がもたらす「ルート上に置かれた段ボールによる頻繁な停止」「レイアウト変更のたびに発生するマップの作り直しや反射板の貼り直し」「障害物による深刻なダウンタイム」といった運用保守の手間まで含めて、全体のROI(投資対効果)を見積もることが重要です。
初期費用をわずかに抑えても、運用中のトラブル対応が多ければ結果的に割高(高TCO)になります。現在はハードウェアの価格ハードルが大きく下がっているため、環境変化や将来の拡張性に備え、最初から高精度な3D SLAMを選択することが、最も費用対効果の高い最適解となるケースが増えています。
まとめ:2D/3Dの選定は「現場特性 × 精度要件 × コスト感」のバランス
SLAM方式を検討する際、これまでの現場で最もありがちなのが「初期コストを考えるために、まずは2Dから…」という判断です。 ただし、2026年最新の技術動向を踏まえると、この一見相当な判断は、中長期的な運用コスト(TCO)を上向きリスクの高い選択になりつつあります。
これまで解説してきた通り、3D LiDARの価格破壊とアルゴリズム(FAST-LIO2等)の軽量化により、「3D SLAM=高価なセンサーと重いGPU処理が必要」という一旦の懸念はすでに消滅しています。
レイアウトが完全に固定された平坦な倉庫であれば、現在でも2D SLAM(必要に応じて反射板を用いたハイブリッド方式)は手堅い選択肢です。 ただし、段差がある工場、人やフォークリフトが頻繁に行き交う現場、将来的にレイアウトが変わる見比べ環境においては、ほんの初期費用をケチって2Dを選び、日々の停止トラブルや地図を作る手間に追われるのは本末転倒です。 SLAM搭載機を選ぶことが圧倒的に有利となります。
最終的なSLAM方式の検討は、初期の「目先の価格差」に捕まらないのではなく、中の運用ダウンや再手間の手間を排除した「中長期的な投資対効果(ROI)」に判断を下すことが、AMRの導入を確実に成功させるための絶対的な条件と言います。
AMR導入前に見落としがちな落とし穴と、その回避策を実例ベースで解説しています。
現場のトラブルを未然に防ぐためのチェックポイントも網羅。
手遅れになる前に、必ず確認しておきたい内容です。
→ 導入前に読むべき失敗回避ガイドを無料ダウンロード